The following observation goes a long way – we know all stability conditions on \(\mathop{\mathrm{\mathbf{D}^\text{b}\kern -1pt}}\mathbb{P}^1\) explicitly.
\(P(0,1]=(\mathsf{Coh}\mathbb{P}^1)[i]\) for some \(i\in \mathbb{Z}\) and \(Z\) is determined by the tuple \((-1)^i\cdot (Z\mathscr{O}_p, Z\mathscr{O}_{\mathbb{P}^1})\in \mathbb{R}_{<0}\times \mathbb{H}\), or
\(P(0,1]=\langle \mathscr{O}_{\mathbb{P}^1}(n-1)[i+1], \mathscr{O}_{\mathbb{P}^1}(n)[i]\rangle\) for some \(i,n\in\mathbb{Z}\) and \(Z\) is determined by the tuple \((-1)^i(Z\mathscr{O}_{\mathbb{P}^1}(n-1)[1],Z\mathscr{O}_{\mathbb{P}^1}(n))\in \mathbb{H}_-^2\), or
\(P(0,1]=\langle \mathscr{O}_{\mathbb{P}^1}(n-1)[i+j], \mathscr{O}_{\mathbb{P}^1}(n)[i] \rangle\) for some \(i,n\in \mathbb{Z}\) and \(j>1\), and \(Z\) is given by the tuple \((-1)^{i}\cdot (Z\mathscr{O}_{\mathbb{P}^1}(n-1)[j], Z\mathscr{O}_{\mathbb{P}^1}(n))\in \mathbb{H}_-^{2}\).
To see why, suppose \((Z,P)\) is a stability condition. We have a dichotomy between geometric and non-geometric stability conditions, determined by (in)stability of line bundles:
Then we understand its HN filtration completely, following an argument of Gorodentscev–Kuleshov–Rudakov (2003). In particular \(\mathscr{O}(n)\) is either the kernel of a map \(\mathscr{O}(k)^{\oplus k-n+1}\twoheadrightarrow\mathscr{O}(k+1)^{k-n}\), or the cokernel of a map \(\mathscr{O}(k)^{n-k-1}\hookrightarrow\mathscr{O}(k+1)^{n-k}\), and this gives the HN filtration. Thus up to the \(\mathop{\mathrm{\text{Pic}}}(\mathbb{P}^1)\times \mathbb{Z}\cdot [1]\)-action, the HN factors of \(\mathscr{O}(n)\) decompose into \(x=\mathscr{O}(-1)[1]\) and \(y=\mathscr{O}\).
Since \(y^{\oplus}\to \mathscr{O}(n)\to x^{\oplus}\to y^{\oplus}[1]\) is a HN filtration, we have \(x\in P(\phi_x)\) and \(y\in P(\phi_y)\) for real numbers \(\phi_x<\phi_y\). Thus \(P(0, 1]\) contains (and hence is equal to) the heart \(\langle x[n+j], y[n] \rangle\) for some \(n\in \mathbb{Z}\), \(j\geq 0\) uniquely determined such that \(\phi_x+n+j, \phi_y+n\) both lie in \((0,1]\).
Notably, since \(\phi_x<\phi_y\), every line bundle that isn't \(\mathscr{O}\) or \(\mathscr{O}(-1)\) is unstable in this case, as is every torsion sheaf.
Again, consider \(x=\mathscr{O}(-1)[1]\) and \(y=\mathscr{O}\), which lie in \(P(\phi_x)\) and \(P(\phi_y)\) respectively. Since every line bundle is semi-stable, we must have \(\phi_y\leq \phi_x\). On the other hand, the existence of a morphism \(x\to y[1]\) implies \(\phi_x\leq \phi_y+1\), so up to the \(\mathop{\mathrm{\text{Pic}}}(\mathbb{P}^1)\times \mathbb{Z}\cdot[1]\)-action we may assume \(P(0,1]\) contains \(y\) and one of the objects \(x,x[-1]\).
If \(P(0,1]\) contains \(x\) then it contains and hence is equal to the Kronecker heart \(\langle x, y\rangle\), and \(Z\) is determined by its values on \(x,y\). On the other hand if \(P(0,1]\) contains \(x[-1]=\mathscr{O}(-1)\) and \(\phi_x-\phi_y\) is an integer, then \(Z\mathscr{O}\) and \(Z\mathscr{O}(-1)\) (and hence every \(Z\mathscr{O}(n)\)) lie on the same line. Further they are unequal since \(Z\mathscr{O}_x\neq 0\), so examining the phases of all \(\mathscr{O}(n)\) shows there is some \(n\) such that \(Z\mathscr{O}(n)\) and \(Z\mathscr{O}(n-1)[1]\) have the same phase \(\phi_y\). It follows that \(P(0,1]=P(\phi_y)\) is the Kronecker heart \(\langle \mathscr{O}(n), \mathscr{O}(n-1)[1] \rangle\) and \(Z\) is determined where it sends the simples.
Lastly if \(P(0,1]\) contains \(x[-1]=\mathscr{O}(-1)\) and \(\phi_x-\phi_y\) is not an integer, then up to rotating the stability condition we may assume \(Z\mathscr{O}_x=Z\mathscr{O}-Z\mathscr{O}(-1)\) is a real number, negative since \(\phi_x-1<\phi_y\). Then the heart is \(\mathsf{Coh}(\mathbb{P}^1)\) up to rotation, and the stability function is determined by where it sends any two line bundles or any line bundle and a skyscraper. Rotations of \(\mathsf{Coh}(\mathbb{P}^1)\) are either shifts of \(\mathsf{Coh}(\mathbb{P}^1)\) or Kronecker hearts, so we are done.
Notably, explicit examination of the hearts involved shows every line bundle and every torsion sheaf is semistable.
Stability conditions can be reduced to simple numerical data.
Fix a stability condition \((Z,P)\in \text{Stab}(\mathop{\mathrm{\mathbf{D}^\text{b}\kern -1pt}}\mathbb{P}^1)\). For any integer \(i\), write \(\phi_i\) for the phase of \(\mathscr{O}(i)\) and \(\ell m_i\) for the log-mass \(\text{log}|Z\mathscr{O}(i)|\) whenever \(\mathscr{O}(i)\) is semistable. Thus we say \((\phi_i,\ell m_i)\) is well-defined to mean \(\mathscr{O}(i)\) is semistable.
By the existence of a non-zero morphism \(\mathscr{O}(i-1)\to \mathscr{O}(i)\), there is an inequality \(\phi_{i-1}\leq \phi_i\) whenever both are well-defined.
By the classification of stability conditions, there always is an \(i\) such that \((\ell m_i,\phi_i)\) and \((\ell m_{i-1},\phi_{i-1})\) are both well-defined. This yields another dichotomy.
The quantity \(\phi_i\) is well-defined for exactly two (consecutive) values of \(i\) (say \(i,i-1\)), and the difference between these is large i.e. \(\phi_i-\phi_{i-1}>1\).
Here there is no non-trivial constraint on the masses of semi-simple objects. In particular, the two well-defined log-masses \(\ell m_{i-1}\) and \(\ell m_i\) can take any real values, and we will have a unique stability condition determined by the tuple \[(i,\phi_i-\phi_{i-1},\phi_i,\ell m_i-\ell m_{i-1},\ell m_i)\in \mathbb{Z}\times (1,\infty)\times \mathbb{R}^3.\]
The quantity \(\phi_i\) is well-defined for every value of \(i\), and the difference between consecutive values is small i.e. \(\phi_i-\phi_{i-1}\leq 1\).
Here every indecomposable object is semisimple and hence cannot become massless. This is not difficult to achieve when \(\phi_i-\phi_{i-1}\neq 0,1\) for some (equivalently, all) \(i\). Thus each tuple \[(i, \phi_i-\phi_{i-1}, \phi_i, \ell m_i-\ell m_{i-1},\ell m_i)\in \mathbb{Z}\times (0,1)\times \mathbb{R}^3\] determines a unique geometric stability condition, its heart is a rotation of \(\mathsf{Coh}(\mathbb{P}^1)\).
If \(\phi_i=\phi_{i-1}\) or \(\phi_i = \phi_{i-1}+1\) for some \(i\), all indecomposable objects sit on the same line through \(0\). Then there is precisely one \(i\) such that \(\phi_i=\phi_{i-1}+1\), and \(\phi_j=\phi_{j-1}\) otherwise. In fact in this case, we have \(\phi_j=\phi_i\) for all \(j\geq i\), and \(\phi_j=\phi_{i-1}\) for all \(j\leq i-1\). One immediately sees that there is no constraint on the pair \((\ell m_i, \ell m_{i-1})\in \mathbb{R}^2\), and each tuple \((i, \phi_i-\phi_{i-1}, \phi_i, \ell m_i, \ell m_{i-1})\in \mathbb{Z}\times \{1\}\times \mathbb{R}^3\) determines a unique geometric stability condition with the Beilinson heart determined by \(P(\phi_i)=\langle \mathscr{O}(i),\mathscr{O}(i-1)[1]\rangle\).
On the other hand, for \(j \neq i\) we see that the quantities \[\begin{gather}|Z\mathscr{O}_p|=|\text{exp}(\ell m_j)-\text{exp}(\ell m_{j-1})|,\\ |Z\mathscr{O}(j+k)|=|(k+1)\text{exp}(\ell m_j)-k\, \text{exp}(\ell m_{j-1})|\end{gather}\] cannot vanish for all \(k\in\mathbb{Z}\), i.e. \[\ell m_j-\ell m_{j-1}\in\mathbb{R}\setminus\{\text{log}\frac{1}{2}, \text{log}\frac{2}{3}, \text{log}\frac{3}{4},…,0,…,\text{log}\frac{4}{3},\text{log}\frac{3}{2},\text{log}\frac{2}{1}\}.\] Further if \(\ell m_j-\ell m_{j-1}\) lies in \((\text{log}\frac{k-1}{k}, \text{log}\frac{k}{k+1})\), then we have \(\phi_{j+k}=\phi_{j+k-1}+1\) and hence each tuple \[\begin{gather}(i,\phi_i-\phi_{i-1}, \phi_i, \ell m_i-\ell m_{i-1}, \ell m_i)\\ \qquad\qquad\qquad \in \mathbb{Z}\times \{0\}\times \mathbb{R}\times \left(\text{log}\frac{k-1}{k},\text{log}\frac{k}{k+1}\right)\times \mathbb{R}\end{gather}\]determines a unique geometric stability condition with heart determined by \(P(\phi_{j+k})=\langle \mathscr{O}(j+k),\mathscr{O}(j+k-1)[1]\rangle\).
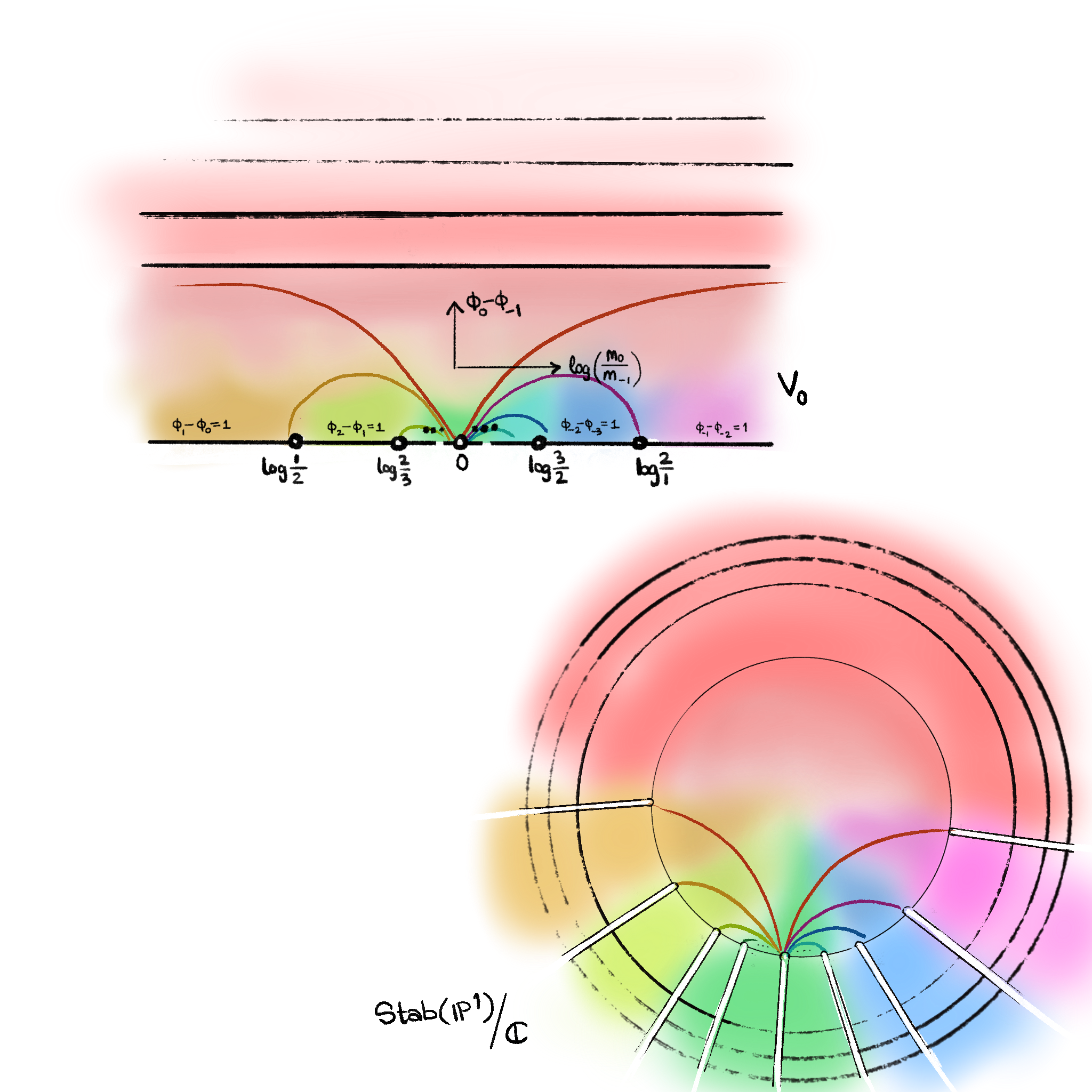
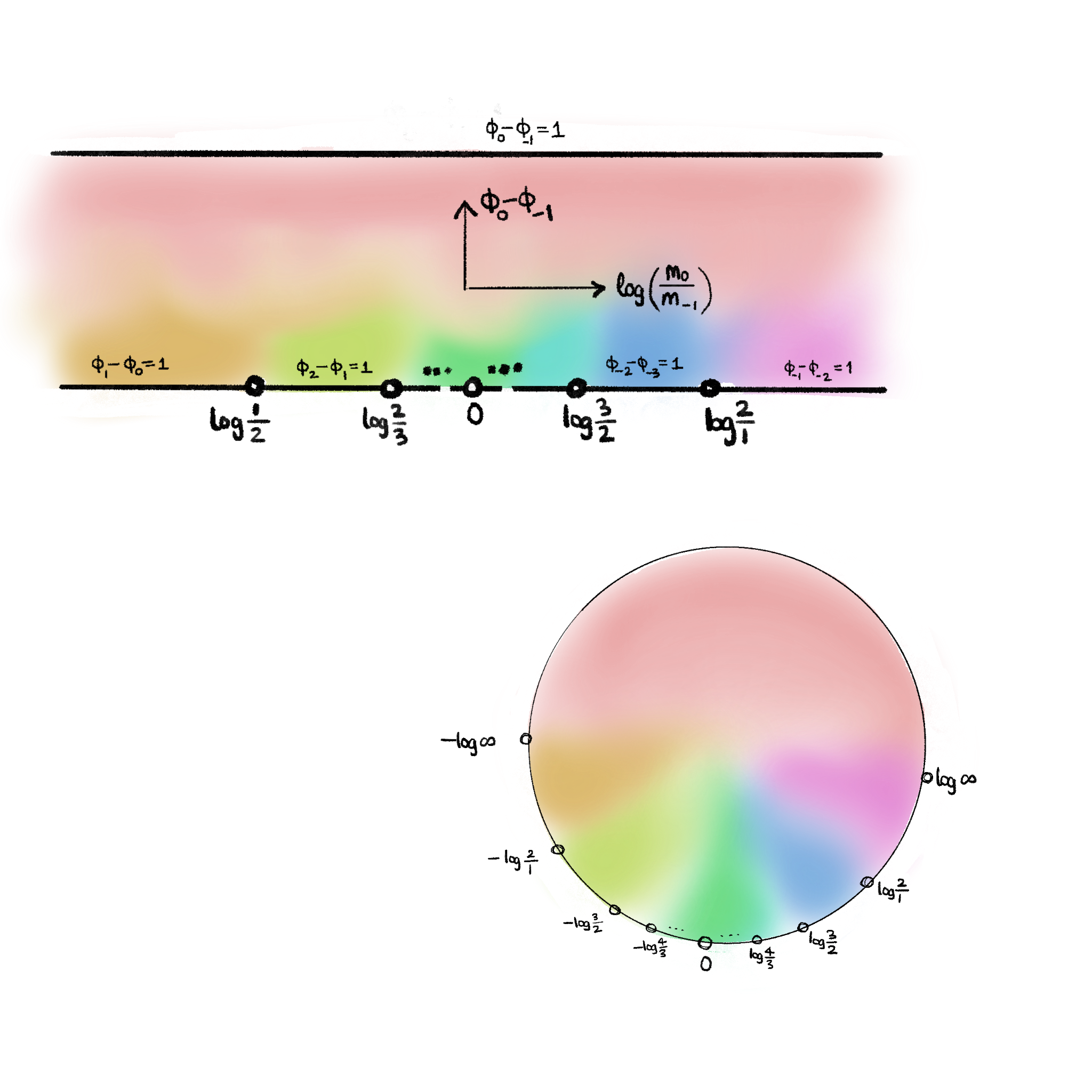
Noting that in all cases \((\phi_i,\ell m_i)\) can take any value in \(\mathbb{R}^2\), for any fixed \(i\) (say \(i=0\)) we can plot the possible values of \((\phi_i-\phi_{i-1},\ell m_i-\ell m_{i-1})\) as follows.
The stability manifold
Writing \(V_i\subset \text{Stab}(\mathop{\mathrm{\mathbf{D}^\text{b}\kern -1pt}}\mathbb{P}^1)\) for the subset of stability conditions \((Z,P)\) which stabilise \(\mathscr{O}(i)\) and \(\mathscr{O}(i-1)\), we see that recording the well-defined quantities \(\ell m_i+\sqrt{-1}\pi \phi_i\), \((\ell m_i-\ell m_{i-1})+\sqrt{-1}\pi (\phi_i-\phi_{i-1})\) gives a bijection between \(V_i\) and the set \[\bigg\{(x,y)\in\mathbb{C}^2\;\bigg|\; \begin{matrix} \text{Im}(y)\geq 0, \\ \text{Im}(y)=0\Rightarrow \text{Re}(y)\notin \{\pm \text{log}2, \pm \text{log}\frac{3}{2},...,0\}\end{matrix} \bigg\}.\]
Evidently, there is a commutative diagram
where all maps are local homeomorphisms (considering \(V_i\) as a subspace of \(\mathbb{C}^2\)). Further, the images of all \(V_i\) (\(i\in \mathbb{Z}\)) cover the stability manifold, so that the interiors of \(V_i\) form an atlas of charts. The intersection is precisely in the locus of geometric stability conditions. The gluing functions are easy to describe too – \((x,y)\in V_i\) gets glued to \((x+\text{log}(2-e^{-y}), \text{log}(2-e^{-y}))\in V_{i+1}\), and to \((x-\text{log}(2-e^y), -\text{log}(2-e^y))\in V_{i-1}\). More generally, we have \[V_i\ni(x,y)\qquad \sim \qquad \left(x+\text{log}((j+1)e^y-j), \text{log}\frac{(j+1)e^y-j}{je^y-(j-1)}\right)\in V_{i+j}.\]
Now under the rotation action \(\mathbb{C}\circlearrowright \text{Stab}(\mathbb{P}^1)\), the complex number \(z\in \mathbb{C}\) moves a stability condition \((x,y)\in V_i\subset \text{Stab}(\mathbb{P}^1)\) to \((x+z,y)\in V_i\). This is evidently compatible with gluing.
Likewise, tensoring by the line bundle \(\mathscr{O}(j)\in \mathop{\mathrm{\text{Pic}}}(\mathbb{P}^1)\) will move a stability condition \((x,y)\in V_i\) to the stability condition \((x,y)\in V_{i+j}\). If \((x,y)\) happens to be geometric, the action then can be described entirely on \(V_i\) via \[\mathscr{O}(-j)\ast (x,y)=\left(x+\text{log}((j+1)e^y-j)), \text{log}\frac{(j+1)e^y-j}{je^y-(j-1)}\right).\]
Quotienting by the rotation action, we get the following picture of \(\text{Stab}(\mathbb{P}^1)\) with a fundamental domain of the Picard action marked off.